I’d just like to see how carefully I’m flying, throttle and the like as you were explaining with the green graph above.
Full throttle will effectively tighten the propellers onto the shafts but sudden deceleration is what could loosen them eg going from full up to full down…
Correct…Full down to Zero. Full up to full down would be worse.
I understand your idea. But full down to zero should increase motor speed? So why this is also a problem?
No, it does not. It is exactly the opposite. Think about it. Increasing throttle leads to higher speed in any direction. Decreasing at a fast rate does the opposite. It slows the motors very quickly as opposed to speeeding them up. Being that 2 motors or CCW threads, the quick decrease in motor speed could lead to prop ejection. It does not work the other way around.
@victorsun…In fact a very abrubt stop in any direction could cause this. But you would need to be flying at a quite high speed. Not so with +/- throttle in a near hover. Just trying to clear that up.
What do you mean by Not so with +/- throttle in a near hover. ? And I had another flight prior to this flight, so you think my prior flight already made prop loose?
No determination of exact cause. I can only go by past data that I have seen and the description of events,some responses say there was a missing prop at the crash site. It is possible definitely, but you can not go exclusively by that. There would be more data needed to indicate that, which would start with the aircraft .dat itself. That would give more data than the device logs. There is not much more in depth we can do without that.
Can I upload aircraft .dat too?
Hold on, correct me if I’m wrong, but you’re saying here the prop could be ejected when going from full down throttle to zero throttle, because it effectively suddenly causes the prop to loosen. That would make sense going from full up throttle to zero, but not full down. When you are going full down throttle, you’re actually going the slowest possible throttle speed - slightly less throttle than what is required to maintain static lift and hover. Going to throttle zero actually suddenly increases the speed to the speed necessary to hover without losing altitude, and in so doing, suddenly tightens the throttles. If anything, it seems going full down throttle is what would have loosened the props.
And I’m not sure what you were getting at regarding 2 of the rotors being screwed in CCW - that is irrelevant, since those motors spin clockwise.
Poor old victorsun is going to get more confused with your input “but you’re saying here the prop could be ejected when going from full down throttle to zero throttle,”
I don’t think anyone has said this. Under full load, full up throttle, all the props will tighten regardless of rotation. A sudden switch to full down throttle, under certain circumstances, could cause the props to loosen.
You are correct, I believe, that under full down throttle it is basically the weight of the drone that brings it down and the props input just enough power to keep it under control.
I was referring to this post above.
You can upload the DAT file to a file sharing site (like dropbox) and share the download link here.
OK, lets see if I can explain the theory a bit easier. Looking at the animation below ( And I realize it is a bit crude ) Notice the direction of prop spin. The props screw on in the opposite rotation than the motors spin, thus “self tightening” when power is increased, IE throttle up.
However, this is not the case when the motors slow down abruptly. A slow decrease of the throttle will have zero to no effect on the “tighness of the screw threads”. But, a very abrubt slow down, such as full throttle down and release to zero, or up will. Or If you fly at very high speeds and do not adjust your braking correctly this can also cause the props to loosen. It is really very simple to understand the reasoning. This is one reason there is a setting in the app for braking. If you notice when you fly at medium to high speed and release the throttle, the aircraft will pitch up, while braking. If you change your braking settings, yes it will take a bit longer to stop for hover, but will also reduce the chance of a loosening prop. A very fast and abrupt stop increases the possibility of loosening a prop. I hope this explains it a bit clearer as to why this is the case in this OP’s scenario.

Fly_Dawg is the one I was responding to, and he just doubled down in the post above, repeating that going from full down throttle to zero is causing the motors to slow down, and suddenly loosen the rotors. The concept is correct - sudden slowing of the motors can cause the inertia of the rotors to outpace the motors and loosen the rotors. This is why DJI switched hub designs. However, as I said before, it is incorrect to say this happens when going from “full throttle down” to zero, because in fact the motors aren’t slowing down when that happens, but are in fact speeding up, and tightening the rotors. “Full Throttle Down” is actually negative, or less throttle, than zero.
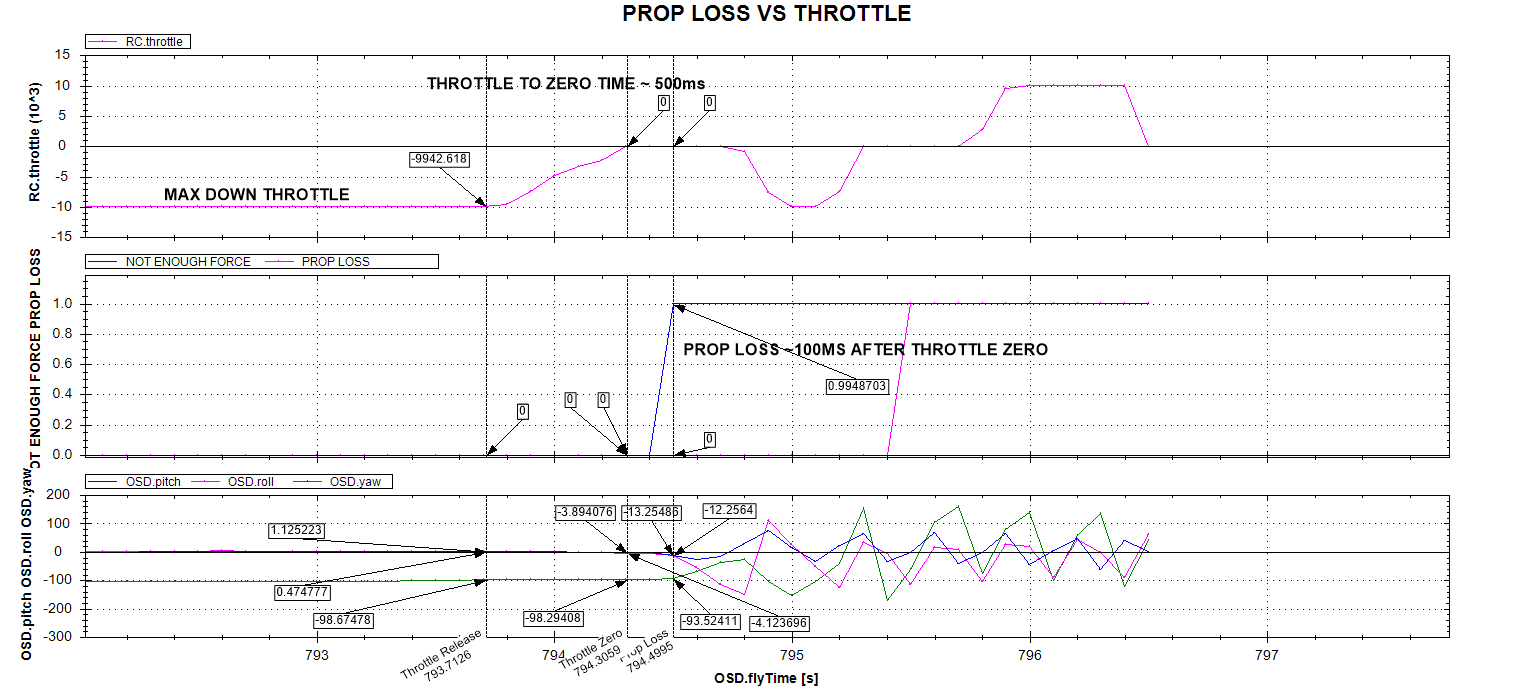
You are correct in that statement. It is not the fact that the motors are slowing down or vice versa, it is the speed in which they do this. An example file ( Not this flight ) that shows a full throttle down. However, bear in mind that this particular example is approximately 3 seconds between full down and zero throttle and also shows the motor RPM’s. The issue is the abruptness of the change. The chart underneath shows that in this particular flight, the throttle release time was approx 500ms, as opposed to the 3 second ease off in the example graph. The point is the quick change. A hub crack would also be a possibility, which would essentially be the same as ejection.

Thanks for your patient explanation. I think my confusion is the same with @NotBillyBob. I fully understand the problem of full up throttle to full down (sudden slowing of the motors can cause the inertia of the rotors to outpace the motors and loosen the rotors). But you are saying full throttle down to zero can also cause prop loose but not due to the reason of inertia but due to a quick change.
It is the speed of the change, very similar to hard fast braking. As I mentioned a hub crack from the change could also occur, which would do basically the same thing. In your flight, it was around 100ms after your throttle reached zero when it appears the prop ejected. Did you locate it and was the hub cracked?
I didn’t try to find the missing prop so can check it. ![]()